|
Jusuk Lee
Hello! I am a Integrated M.S./Ph.D. Student under the supervision of
Prof.H.Jin kim
at Seoul National University. I completed my B.S. in Mechanical Engineering at Yonsei University.
I am interested in the intersection of robotics, machine learning, and deep learning. I am currently focusing on building a generalizable robotic agents capable of adapting to new tasks and environments.
Email /
CV /
Google Scholar /
Github
|

|
News
- Mar 2024: I joined LARR at Seoul National University.
|
Publications
Representative papers are highlighted.
Projects
Representative projects are highlighted.
|
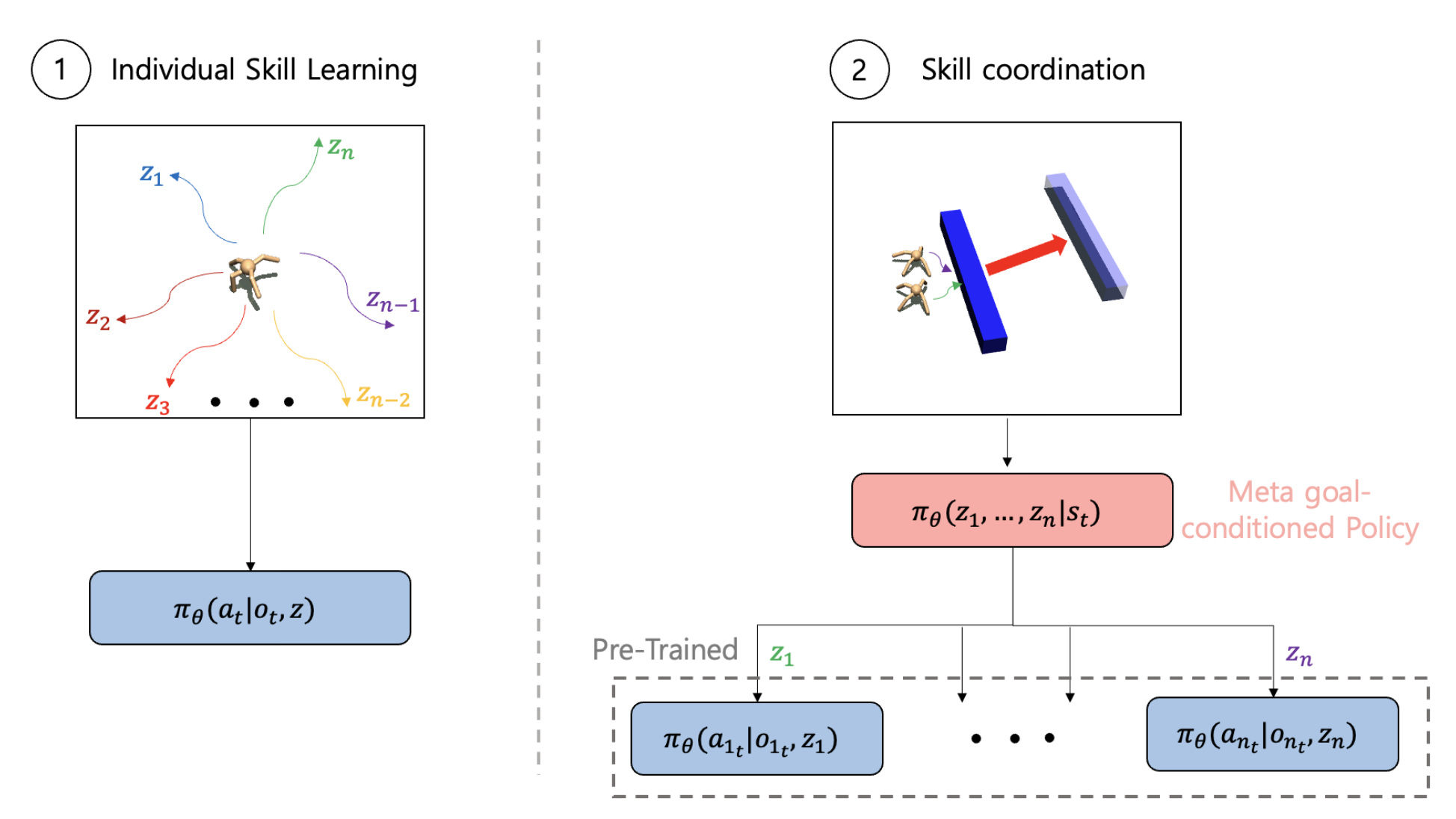
Learning Cooperation with Learned Skills
Multi-agent reinforcement learning(MARL) typically requires the design of
a sophisticated reward function to effectively guide multiple agents in learning
desirable behaviors. However, this process is time-consuming and demands domain
knowledge. In this paper, we train each agent to learn a diverse set of skills
in advance. Then the agents are able to solve complex tasks by effectively
coordinating these skills.
Mar. 2024 - Jun. 2024
paper |
code
|
|
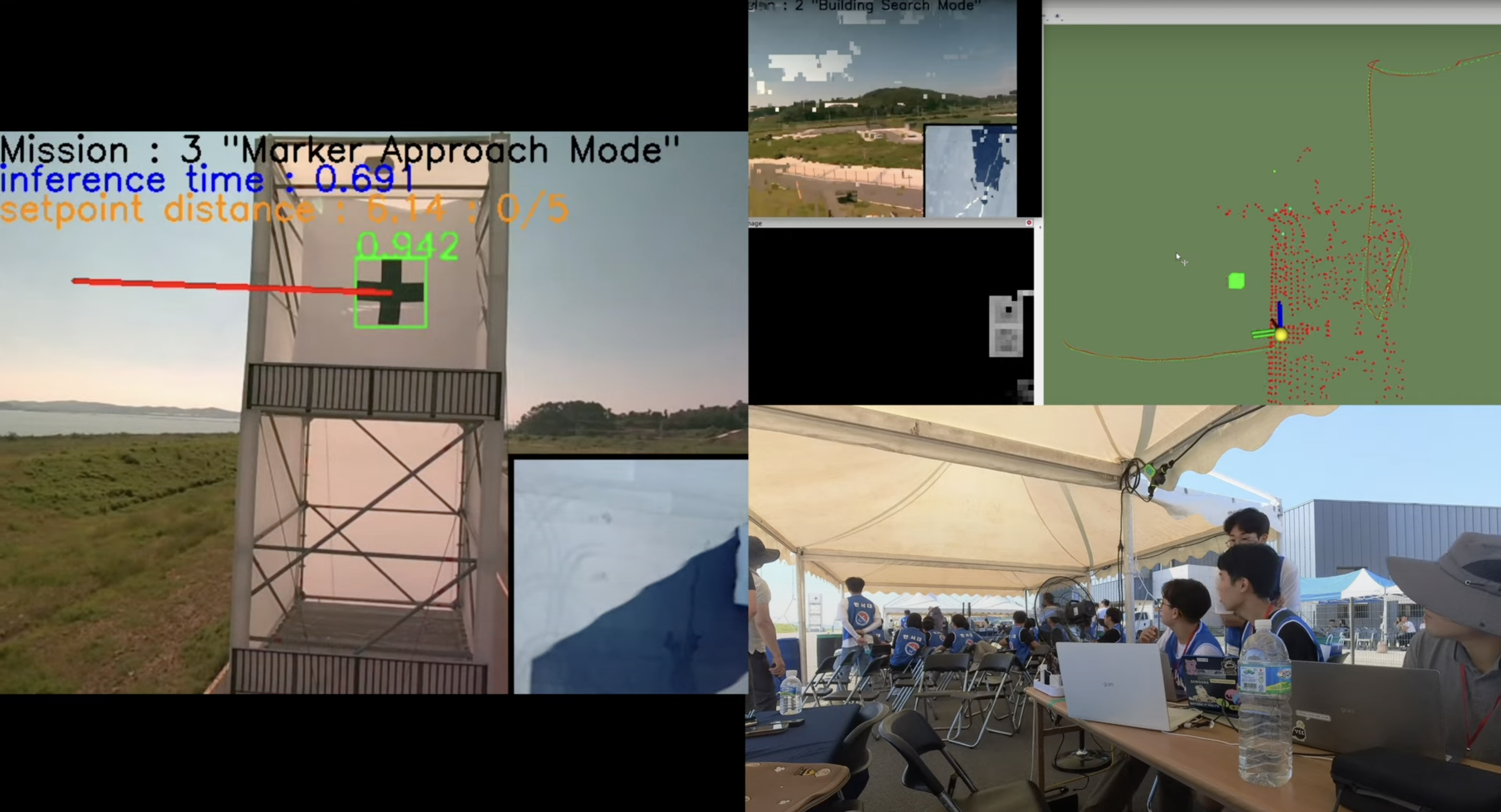
Autonomous drone system
This project focuses on developing an autonomous drone system capable of
real-time obstacle avoidance, building exploration, payload delivery to a
specified location, and safe return to home base. The system has been successfully applied in both simulation and on real hardware.
Mar. 2023 - Sep. 2023
video |
code(real) |
code(simulation)
|
|
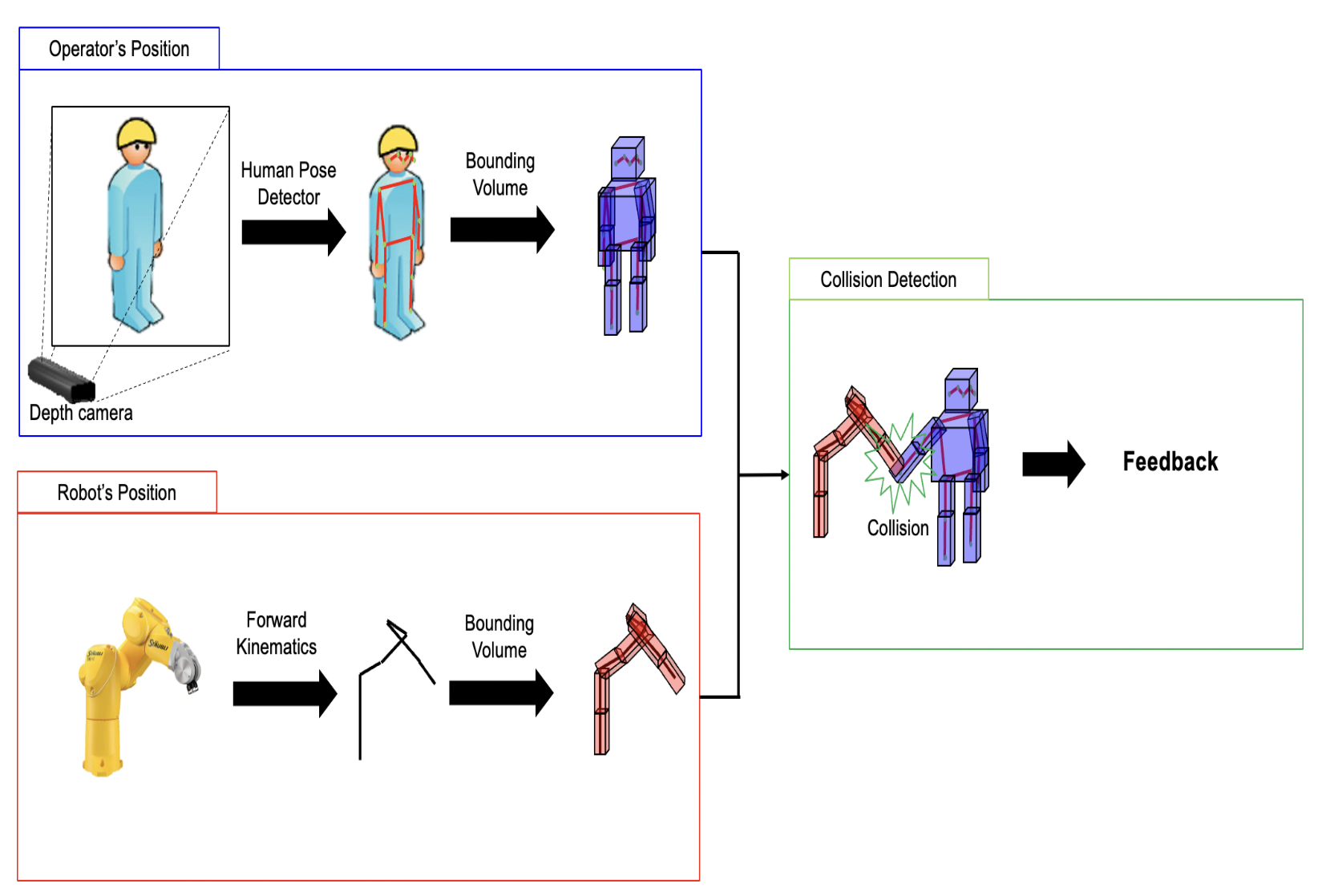
Collision detection system based on computer vision for Human-Robot Interaction
This project proposes a system that detects collision between an operator
and a robot by using a depth camera. Through a human pose detector,
the proposed collision detection system obtains the positional information
of key points of the operator from the images taken by the depth camera.
In addition, the positional information of each robot link is obtained from
the joint angle data of the robot through forward kinematics. Then a bounding
volume (OBB: Oriented Bounding Box) is applied to both the operator and each
robot link. The SAT (Separated Axis Theorem) is used to detect overlap
between bounding volumes and return a feedback signal.
Sep. 2022 - Dec. 2022
paper |
code
|
|
Awards and Achievements
- [Award] 2nd Place at the 21st Korean Aerospace Aircraft Competition
- [Scholarship] Scholarship for academic excellence (2021, 2022)
|
Feel free to steal this website's
source code.
Do not scrape the HTML from this page itself, as it includes analytics tags
that you do not want on your own website — use the github code instead.
Also, consider using Leonid Keselman's
Jekyll fork of this page.
|
|
|